Accelerometer is a kind of equipment used to measure the acceleration of objects, in order to ensure the accuracy of the data in the process of vibration and shock test and measurement, according to the frequency of use and the use of environmental conditions to determine the calibration cycle, usually half a year or one year. In some critical tests or costly destructive tests, calibration is recommended before each use. This article will introduce the calibration method and use skills of accelerometers.
1.Calibration method
The calibration of the accelerometer is the key to ensure the accuracy of its measurement results. Here are some common calibration methods:
1.1 Static Calibration
Static calibration is a calibration performed in a stationary state. Place the accelerometer on a horizontal table and record its output value. Its zero drift and sensitivity can be determined by comparing it with known gravitational acceleration values.
1.2 Dynamic Calibration
Dynamic calibration is carried out when the object is moving in a straight line at uniform speed. Fix the meter on the object and record its output value during movement. The deviation can be determined by calculating the difference between its output value and the expected acceleration during movement.
1.3 Comparison Calibration
Comparative calibration is the calibration of an accelerometer by comparing it with a reference addition known to be of high accuracy. Place both of them on the same object, perform the same motion, and record their output value. By comparing the difference between the two, the error to be calibrated can be determined.
2.Using ways
Reasonable using ways can improve the measurement and analysis of the accelerometer, the following are some commonly used techniques.
2.1 Fixed Position
In the acceleration measurement, the accelerometers should be fixed on the measured object as far as possible, and ensure that its position is stable to avoid interference with the measurement result due to movement or vibration.
2.2 Increasing the sampling rate
The resolution and sensitivity of the accelerometer can be improved by increasing the sampling rate appropriately. When measuring rapid acceleration and deceleration, a higher sampling rate allows instantaneous changes to be more accurately captured.
2.3 Filter Processing
The output signal may contain noise or high-frequency vibration components, which can be filtered to reduce noise and extract useful signals. The commonly used filtering methods include low-pass filtering and high-pass filtering.
3.Calibration precautions
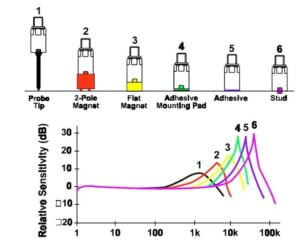
3.1 Installing of the Sensor
Different installation methods will significantly affect the resonant frequency of the sensor, that is, the high-frequency response of the sensor. The following figure illustrates the effect of the installation method on the resonant frequency. Screw installation is preferred, followed by hot melt adhesive or quick-drying adhesive, then double-sided adhesive and so on.
3.2 Selection of sensor cable
Calibrate the sensor cable as far as possible to choose a relatively soft cable, such as silicone or PVC cable, which can reduce the impact of the cable on the sensor, including the shaking table moving core. During the actual test, it is recommended that the cable and sensor be fixed on the same structure. Due to the limited mounting surface during the sensor calibration process, it is recommended to use a flexible cable connection.
3.3 Calibration of X axis of three-axis sensor
The X axis of most three-axis sensors is inverted, so the frequency response of the sensor X axis is usually narrower than the frequency response of the Y and Z axes. Moreover, when testing the X-axis, the top line is out, and attention needs to be paid to the fixing of the cable.
In summary:
Through the above content, you can understand the calibration method of the accelerometer, the use of skills and precautions. Ericco’s ER-QA-03A and ER-QA-01A can be calibrated using the above methods to ensure their accuracy and reliability, but also to improve the accuracy of the test and analysis.
The full text link:https://www.ericcointernational.com/application/calibration-method-of-accelerometer.html
Email : info@ericcointernational.com
Whats app:1399288487
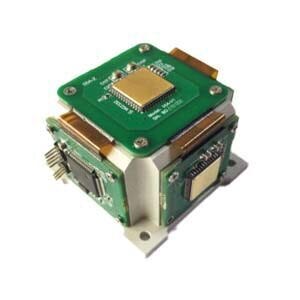




 Figure 1. Installation error angle in non-normal coordinate system
Figure 1. Installation error angle in non-normal coordinate system






.jpg)
