The quartz accelerometer’s pendulum plate is formed by quartz material after laser cutting, acid etching and other special processing, and the thermal expansion coefficient is very small, which is 1/10 to 1/20 of ordinary glass, but the quartz glass is a brittle material, and the thickness of the flexible beam is 0.03mm, which is easy to break. In actual work, the acceleration sensor may often be in a harsh environment such as vibration, shock, and temperature upheaval, which has a great test for its accuracy and stability. In addition, the uneven thickness of the flexible beam edge will also reduce the reliability of the pendulum. Therefore, to study the impact resistance of quartz accelerometer is to study the impact resistance of pendulum components.
Measures to improve the impact resistance of quartz accelerometer
Material improvement
The technical requirements for materials used in flexible beams are:
1) The tensile strength is large, and the elastic modulus and stiffness are small.
2) Small elastic aftereffect. Elastic aftereffect refers to the phenomenon that when the object is subjected to a fixed load, its shape variable increases slowly with time, and when the load disappears, it cannot immediately return to the original state. The elastic aftereffect of the flexible beam directly affects the output hysteresis of the accelerometer.
3) High fatigue strength. Quartz flexible accelerometers are sensitive to both positive and negative accelerometers, and are often in an irregular reciprocating motion when working, especially in systems with pulse output, the vibration frequency of flexible beams is very high.
4) Easy to process. The thickness of the quartz flexible beam is only 0.03mm, which is made by special processing such as laser cutting and acid etching, and the processing is difficult and the efficiency is low. At present, the “strength elastic ratio” is commonly used to measure the quality of materials. It refers to the ratio of the strength limit to the elastic modulus, and within the allowable range, increasing the ratio can improve the stability of the accelerometer.
According to the relevant literature, the ion implantation method can improve the performance of flexible beams. When high-energy ions are injected into the surface of the material with an ion implantation machine, its mechanical and physical properties can be greatly improved, such as Au+, N +, etc. into the joint of the flexible beam, which can improve its fatigue life and corrosion resistance. In addition, with the popularity of carbon fiber, the emergence of short carbon fiber quartz composite materials, its fracture resistance is 4 times that of pure quartz glass.
Structural improvement
Through transient dynamic analysis, it can be seen that the quartz flexible accelerometer has the weakest impact resistance in the direction of output axis, because in the direction of pendulum axis, the flexible beam is mainly subjected to tensile or compressive stress and the value is small, while in the direction of input axis, there is a magnetic yoke limit, which can only swing 0.019mm maximum. Therefore, it is necessary to focus on improving the impact resistance of quartz pendulum in the direction of output axis.
1) In the structural design, try to make the center of the torquer, the center of gravity of the pendulum component and the limit support three points coincide in the direction of the input axis. However, due to the complexity of the pendulum assembly, it is almost impossible for the three points to coincide completely, and the impact force of the flexible beam is proportional to the distance of non-coincidence.
2) Increase the width of the flexible beam, the thickness is the most important factor affecting the stiffness, sensitivity and natural frequency of the flexible beam, and the smaller the allowed range, the better the performance, it is not appropriate to change its value. However, the increase of the width of the flexible beam has little effect on the above properties, and can greatly reduce the shear stress of the flexible beam in the direction of the output axis.
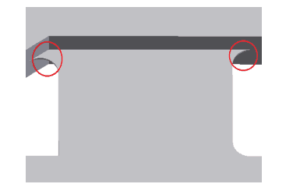
3) Increase the transition fillet of the fixed end of the flexible beam. Under the action of acceleration load, the stress at the junction of the swing plate beam and the outer ring is the largest. Rounded corners reduce stress concentration and increase service life.
4) Set a limit support in the direction of the output axis of the accelerometer, professionals in the relevant fields have designed an impact type accelerometer, the main features are: add a limit convex table on the inner side of the pendulum ring, or set a limit pin on the torque yoke to reduce the maximum deformation of the pendulum plate in the direction of the output axis.
summary
In this paper, based on the relevant literature research data, the impact resistance of acceleration sensors can be improved by means of material and structure improvement.
Quartz accelerometers produced by Ericco, such as ER-QA-03A, has good impact resistance and it’s bias repeatability is10-50μg and scale factor repeatability is 15-50 ppm. In the future inertial system application field, its performance will have a better breakthrough.
REFENCE LINK:https://www.ericcointernational.com/application/how-to-improve-the-impact-resistance-of-quartz-accelerometer.html
Email : info@ericcointernational.com
Whats app:+8613992884879

 1.MEMS inertial sensor error analysis
1.MEMS inertial sensor error analysis



 Formula4: The power spectrum of thermal noise1-4
Formula4: The power spectrum of thermal noise1-4 where xByBzB is the reference orthogonal coordinate system, xyz is the coordinate system of the gyroscope group or accelerometer group, θij (i, j=x, y, z) represents the installation error angle, where i represents the measurement axis, j represents the measurement axis around j The installation error angle caused by shaft rotation is positive in counterclockwise direction. The transformation from the reference coordinate system to the axis coordinate system is as follows.
where xByBzB is the reference orthogonal coordinate system, xyz is the coordinate system of the gyroscope group or accelerometer group, θij (i, j=x, y, z) represents the installation error angle, where i represents the measurement axis, j represents the measurement axis around j The installation error angle caused by shaft rotation is positive in counterclockwise direction. The transformation from the reference coordinate system to the axis coordinate system is as follows.