
Accelerometer is a device that can measure the acceleration experienced by an object. Acceleration can be defined as the force applied per unit of mass, A=F/m. It is the rate of change of an object’s velocity with respect to time.
There are many types of accelerometers: linear accelerometers (detection mass for linear displacement) and pendulum accelerometers (detection mass rotation around the support shaft) are categorized according to the displacement type of detection quality; gemstone supports and flexible supports are classified according to the support type. , Air flotation, liquid floatation, magnetic levitation, electrostatic suspension, etc.According to the composition of measurement systems, there are open-loop type and closed-loop type; according to the working principle, there are vibrating wire type, oscillating beam type and pendulum type gyro accelerometer; The number of input shafts is classified into uniaxial, biaxial and triaxial accelerometers; they are classified by sensor elements, such as piezoelectric, piezoresistive and potentiometer type. An accelerometer is usually named by combining the features of several different classifications.
There are four types of accelerometers:
1. Piezoelectric accelerometer
Piezoelectric accelerometers work by sending an electrical signal from the sensor when sudden acceleration is encountered. The structure of the piezoelectric accelerometer consists of a sensing crystal on which seismic weights are attached. When the sensor experiences acceleration, the weight exerts a force on the crystal. The piezoelectric crystal converts the force acting on it into an electrical signal that can be measured to find the acceleration. Piezoelectric accelerometers are very effective at measuring shock and vibration.
2.piezoresistive accelerometer
Piezoresistive or piezoresistive accelerometers work by changing their resistance according to the acceleration experienced. Changes in acceleration can be measured to understand the rate of acceleration experienced by the sensor. Piezoresistive accelerometers are not as sensitive as piezoelectric accelerometers because they are not the best at measuring low frequency effects. However, they work best at high amplitudes and have found their applications in vehicle crash testing and weapon testing. Capacitive accelerometers: Capacitive sensors work by changing their capacitance based on the acceleration they experience. Their structure consists of two capacitive plates and a diaphragm. When the sensor experiences acceleration, the diaphragm moves, changing the distance between the capacitor plates. This causes a change in the capacitance of the sensor, and this change in capacitance can be measured and converted into acceleration on the sensor. You’ll find capacitive MEMS(micro-electro-mechanical System) accelerometers in most smartphones today.
3. Capacitive accelerometer
These types of accelerometers sense capacitance changes associated with acceleration. The sensing element of a capacitive accelerometer consists of two parallel-plate capacitors operating in differential mode.
These shunt capacitors operate in a bridge circuit, and they have two fixed capacitors that change the peak voltage produced by the oscillator while the sensor is in an accelerated state. The detection circuit detects the peak voltage, which is fed to the adding amplifier to process the output signal.
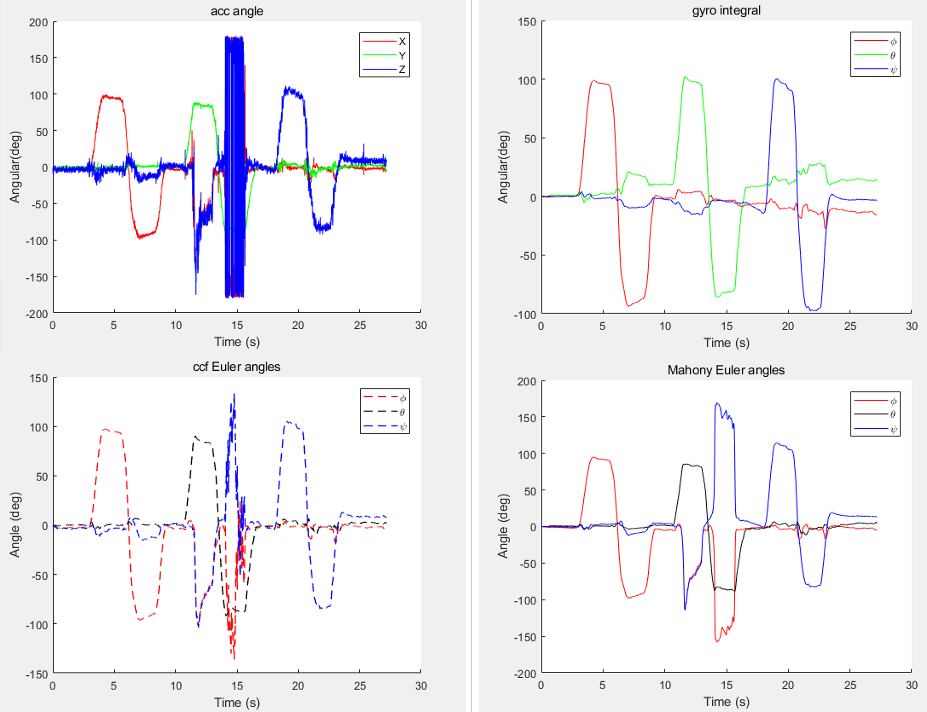
A triaxial accelerometer can measure acceleration in three orthogonal directions (or three vertical planes-x, Y, and Z). This feature enables the three-axis accelerometer to measure all vibration components affecting an object. The triaxial accelerometer consists of three sensing elements that are perpendicular to each other. They can be used to measure building vibrations, turbines and high-speed machinery.
If you want to get more details about quartz-accelerometer,pls visit https://www.ericcointernational.com/accelerometer/quartz-accelerometer/
Email : info@ericcointernational.com
Whats app:1399288487












.jpg)
