Ericcogyro is a leader supplier of Inertial Sensor products North Finder,North seeking system,DTG,FOG,MEMS Gyroscope,Accelerometer,IMU,INS,electronic compass, our inertial sensor are sold worldwide and get the good feedback from our clients .
An accelerometer is an instrument used to measure the linear acceleration of an object. It integrates the acceleration within a certain period of time to obtain the speed of the object under measurement, and integrates the speed to obtain the displacement of the object under measurement. The net acceleration or force of the system over time is gravity, and an accelerometer can also be used to measure the static Angle of tilt or tilt. The quartz flexible accelerometer is one of the representative products of the accelerometer, and adopts high-quality quartz crystal, which can realize high precision acceleration measurement, and has high reliability and stability. Its special flexible construction enables it to adapt to high acceleration applications under various environmental conditions, such as high temperature, high pressure and high vibration environments.
Applications in the aerospace field
Quartz vibration beam accelerometers can be used to measure the body vibration and flight state of aircraft in order to better estimate the life of aircraft and maintenance costs. In addition, the quartz vibration beam accelerometer can also be used in the development of pilot helmets to ensure that it can smoothly adapt to aerodynamic changes, and thus ensure the safety of the pilot. For example, ER-QA-03A has a zero-bias stability of 10-50μg, a scale factor repeatability of 15-50 PPM, and a second-order nonlinearity of 10-30μg/g2, which is often the best choice for high-performance, aerospace applications.
Applications in oil drilling
Quartz flexible accelerometer is one of the many accelerometers with relatively simple structure, high performance-to-volume ratio and performance-to-price ratio, especially in the high temperature environment of drilling and logging. It is one of the few accelerometers in China that has been verified by a lot of actual underground work experience, and has high temperature and high reliability product characteristics. The ER-QA-03D is designed for the drilling sector and is capable of shock resistance of 0.5ms at 500-1000g in an operating environment of -55 to 180 ° C.
If you want to know more about quartz accelerometers or purchase, please contact me through the following ways:
IMU is used to measure the angular velocity and acceleration of objects. The accuracy of the IMU determines the accuracy of its measurement data and has an important impact on the deception detection algorithm. Global navigation satellite system (GNSS)/inertial navigation system (INS) tightly integrated navigation system usually uses the original observation information (such as pseudorange, pseudorange rate, Doppler, etc.) output by GNSS as Measurements. INS is an inertial navigation system, a system that uses IMU measurement data for navigation. The optimal state estimator of the system is obtained through fusion filtering by the Kalman filter and the measurement values output by the inertial measurement unit in the INS. The tight combination mode has become a hot spot in the current research on GNSS/INS integrated navigation technology due to its moderate calculation amount and good navigation performance.
For civilian satellite navigation signals with an open signal system, forwarding deception and generative deception methods can be used; however, for authorization signals with unknown pseudo codes, forwarding deception and interference can be used, so the accuracy and security of navigation and positioning are seriously threatened. . Deception detection in integrated navigation systems is an important way to improve the reliability of integrated navigation systems. Among them, commonly used innovation-based deception detection methods include snapshot deception detection method and continuous deception detection method. It is difficult to detect ramp-type pseudorange spoofing using the snapshot spoofing detection method, but the detection effect for step-type spoofing is much better. The continuous spoofing detection method can effectively detect the slope spoofing problem, but the longer the window, the longer the calculation time.
The impact of different IMU accuracy on the tight combination anti-spoofing interference algorithm will be analyzed below. Firstly, the GNSS/INS tight combination model and spoofing interference model are explained. Secondly, the impact of the propagation error of IMUs with different performances on the pseudorange prediction value and the mean value of innovation detection amount under the short-time uniform linear error propagation model is analyzed. Finally, experiments were conducted to verify the impact of different precision INS on the tight combination deception detection algorithm.
1 GNSS/INS tight combination model and deception interference model
1.1 GNSS/INS compact combination model
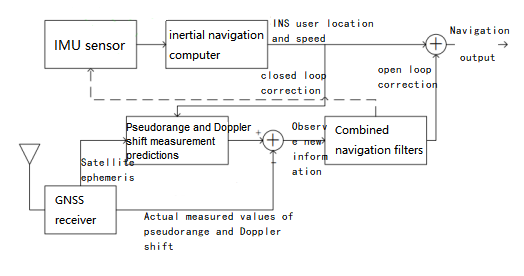
The GNSS/INS compact combination structure model is shown in Figure 1. Based on the receiver position velocity output by the INS and the satellite position velocity obtained from the GNSS satellite ephemeris, the combined system can more accurately predict the pseudorange and Doppler frequency shift of the GNSS signal, and these pseudoranges and pseudorange rates The difference between the predicted value and the actual GNSS measurement value forms the Kalman filter observation value. The observation value can be corrected for the INS positioning and speed results through the Kalman filter system.
Figure1 GNSS/INS tight combination diagram
In filters used with INS, the state vector is usually not the estimated state. In order to reduce the impact of linearization error, the error state vector is usually selected. According to the characteristics of the tight combination mode, a total of 17 states, including position error, velocity error, attitude error, gyroscope bias, accelerometer bias, clock error and clock drift, are selected as the error state vector. In closed-loop Kalman filtering, the error estimate obtained by filtering is fed back in each iteration to correct the system itself, making the Kalman filtering state tend to zero in the process. In open-loop Kalman filtering, since there is no feedback, the state value will gradually become larger as time goes by. Therefore, closed-loop Kalman filtering is commonly used in integrated navigation.
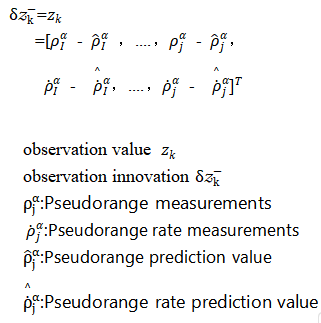
When performing closed-loop Kalman filtering, the observation value and the observation innovation are the same. Therefore, there are
1.2 Deception and interference model
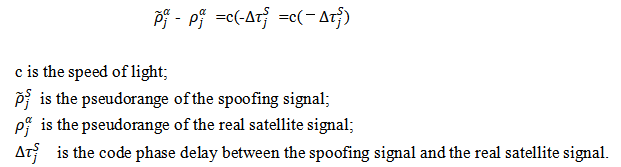
The mathematical model of pseudorange deception based on GNSS measurements can be expressed as
The code phase delay can be specifically expressed as
If a=0,b≠0, it means step pseudorange spoofing; if a≠0,b=0, it means slope pseudorange spoofing.
2 Impact of IMU accuracy on spoofing detection algorithm
2.1 Deception detection algorithm
The higher the accuracy of the IMU, the more accurate its measurement data, and the higher the accuracy of the deception detection algorithm. The accuracy of the IMU determines the response speed of the deception detection algorithm. For a Kalman filter, the measured innovation vector is shown in equation (4), which is the difference between the actual observation vector and the one-step prediction vector , that is
The innovation vector can indicate whether the measurement is consistent with the estimate, and its size is determined by the measurement error and the accuracy of the system model. When the accuracy of the system model is high, the Kalman filter information can represent the actual measurement error. The covariance of the innovation is the sum of the values converted into the measurement space by the measurement noise covariance and the error covariance of the state estimate, that is
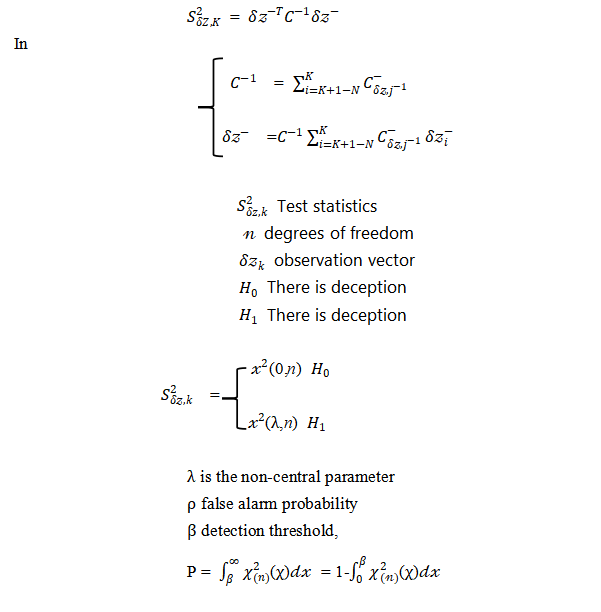
Smaller, slowly building up deviations between measurements and state estimates can be identified by a statistical test consisting of the latest N measurements. N is the “detection window”. When N is 1, it is snapshot deception detection, and when N is greater than 1, it is continuous deception detection. Chi-square test is often used in the innovation deception detection algorithm, and the innovation test statistic is constructed as
2.2 The impact of INS error propagation on observation information
IMU accuracy is usually characterized by bias and random noise. The bias error term exists in all accelerometers and gyroscopes. In most cases, the bias error term is the main component of all errors in inertial instruments; in addition, it is affected by a variety of Effect of Error Sources,All inertial sensors exhibit random noise.
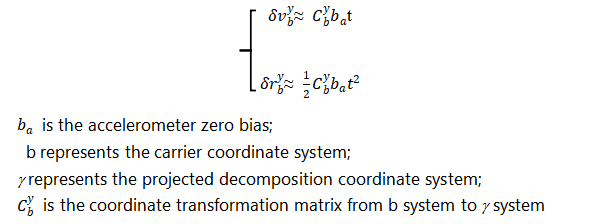
In the GNSS/INS combined system, since the output results of GNSS and INS must be fused and filtered every interval, when considering the impact of IMU accuracy on new information, the error propagation model of INS can be equivalent to a short-time uniform straight line Error propagation. The speed error is the integral of the acceleration error. The speed and position errors caused by the constant acceleration deviation are
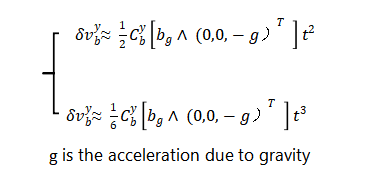
The measured specific force can be approximated as the opposite value of acceleration when moving at a uniform speed on a horizontal plane for a short period of time. Then the position and velocity errors caused by the gyro bias can be simply expressed as
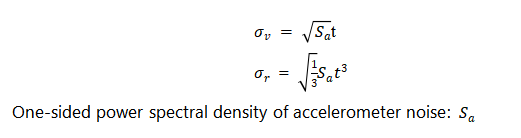
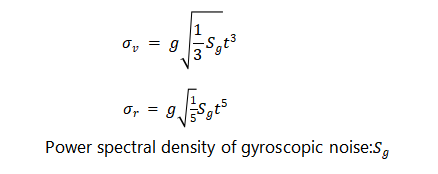
In the formula, is the acceleration due to gravity. In addition, in a well-designed system, the inertial sensor noise will be the largest noise source, which can be obtained from the inertial navigation error variance or the time update covariance matrix of the Kalman filter. In order to quantify the relationship between inertial navigation error and time, if the one-sided power spectral density of accelerometer noise is , then the standard deviation of the velocity error and position error caused by the noise is
In the same way, the standard deviation of the speed error and position error caused by noise is
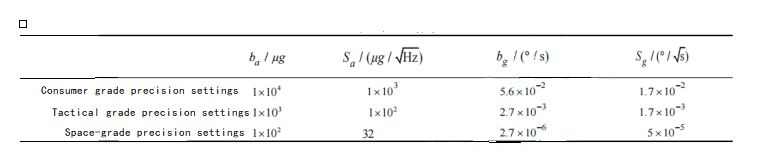
The IMU accuracy reference for different performance levels is shown in Table 1.
Table 1 IMU accuracy reference for different performance levels
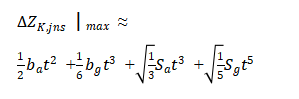
According to the IMU performance parameters shown in Table 1, calculate the pseudorange prediction error caused by INS error propagation at different state propagation intervals. Because the satellite velocity position at k can be obtained from the GNSS satellite ephemeris, assuming that the receiver position is accurately known, then The projection of the position error caused by the INS in the line of sight direction of the receiver and satellite is the pseudorange prediction value error. Consider the situation with the largest error, that is, we have
The calculation of propagation errors under different levels of IMU and different error propagation times is shown in Table 2.
Table 2 Pseudorange error
Therefore, the observation value error caused by the IMU accuracy not only increases as the IMU accuracy decreases, but also increases as the error propagation time increases. Since each iteration of the closed-loop Kalman filter corrects the system itself, the INS error propagation time in integrated navigation is the state propagation interval of the Kalman filter, that is, the observation value error caused by the IMU accuracy increases as the Kalman filter state propagation interval increases. And increase.
When using integrated navigation information to detect spoofing interference, it is usually assumed that the output of the INS within the state propagation interval is relatively accurate; however, due to the influence of IMU accuracy, the pseudorange error caused by the INS is close to or even exceeds that caused by spoofing interference at the same time. When the pseudorange deviates, the results obtained by innovation detection will become unreliable. It can be seen from the analysis in Section 1.1 that when there is an INS propagation error at time , the observation vector is also an observation innovation vector in the closed-loop correction, and the pseudorange observation part can be expressed as
The principle of innovation deception detection is to take advantage of the fact that innovation obeys a zero-mean Gaussian distribution when there is no deception interference, and obeys a Gaussian distribution with a non-zero mean when there is deception interference. However, if the pseudorange deviation caused by IMU accuracy is large, it will destroy the characteristics of the zero-mean distribution of innovations, thereby affecting the deception detection algorithm.
It can be seen that when using innovation for deception detection, there are requirements for IMU performance, that is, the total deviation of the observation value caused by the IMU within the detection window cannot exceed the detection threshold of the innovation deception detection algorithm.
3 Experiment and result analysis
3.1 Experimental design
In order to compare the impact of different IMU accuracy on deception detection algorithms, it is considered that the observation value error caused by IMU accuracy not only increases with the decrease of IMU accuracy, but also increases with the increase of Kalman filter state propagation interval and detection window length. Large, experiments are mainly designed from the following aspects:
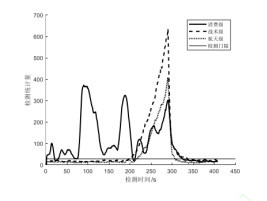
(Experiment 1) Apply the same ramp-type deception, and analyze and compare the impact of different precision INS on the deception detection algorithm within the same state propagation interval.
Figure 2 Detection situation at different IMU accuracy
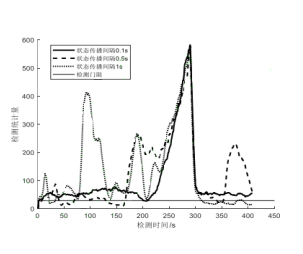
(Experiment 2) Apply the same ramp-type spoofing to analyze and compare the impact of lower-precision INS propagation intervals in different states on the spoofing detection algorithm.
Figure 3 Detection situation at different state propagation intervals
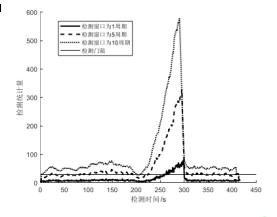
(Experiment 3) Apply the same ramp-type spoofing, and analyze and compare the effects of spoofing detection algorithms with different detection windows on low-precision INS and the same state propagation interval.
Figure 4 Detection conditions in different windows
Combining the results of the three experiments, it can be seen that IMU accuracy will indeed affect the detection effect of the deception detection algorithm. When using consumer-grade IMUs, the impact will be greater, and it may even cause the deception detection algorithm to fail. Specifically, when there is no interference from spoofing, the spoofing detection statistics are still affected by the error caused by the IMU accuracy, causing the spoofing detection statistics to exceed the threshold. And experiments show that the impact of low-precision IMU can be reduced by adjusting the Kalman filter state propagation interval and the detection window of the spoofing detection algorithm.
Summarize
Through theoretical derivation and simulation experiments, this paper comparatively analyzes the impact of different IMU accuracy on the tight combination anti-spoofing algorithm, and experimentally analyzes the effects of two factors: the Kalman filter state propagation interval and the detection window of the spoofing detection algorithm. The results show that the influence of different IMU accuracies on pseudorange estimates causes the innovation detection amount to no longer be zero mean when there is no spoofing interference. The use of innovation-based spoofing detection algorithms has requirements for IMU accuracy. With the detection probability and Kalman As the filtering state propagation interval increases, the requirements for IMU accuracy increase.
Specifically:
1) IMU accuracy does affect the detection effect of the deception detection algorithm, and consumer-grade IMUs can cause false alarms in the chi-square deception detection algorithm.
2) Under the condition that the state propagation interval of the Kalman filter is less than or equal to 0.1 s and the detection window used is equal to 1, the false alarm problem of the chi-square deception detection algorithm caused by the consumer-level IMU is solved, but when there is a detection greater than 50 s extension.
Then the domestic company ERICCO independently develops IMU, which is divided into navigation level and tactical level. Navigation-level ER-MIMU01 and ER-MIMU05 can independently seek north. Other IMUs only need to add GNSS and magnetometers to the IMU to independently seek north. They also have a wide range of applications. For example, ER-MIMU03 and ER-MIMU07 can be used in drones. This product has a built-in acceleration sensor and gyroscope, which can measure linear acceleration and rotational angular velocity in three directions, and obtain the carrier’s velocity through analysis. Attitude, velocity and displacement information enable precise positioning.
If you want to learn about or purchase IMU products, please contact our relevant personnel.
The precision of the quartz accelerometer is closely related to its processing and assembly accuracy during production. Accelerometer is a kind of instrument with complicated production process, and a large number of uncertain factors are introduced in processing and assembly. It is helpful to improve the accuracy of accelerometer by analyzing it in detail.
1) Processing technology
The components of quartz accelerometer have the characteristics of thin wall, high precision, complex shape and small size in structure. In the process of machining and assembly, the manufacturing accuracy, shape error and dimensional accuracy are all up to μm level. However, these parts will introduce some uncertain factors in the assembly process, so the whole process will inevitably introduce small errors. The structure of the accelerometer itself is relatively compact, and these small errors will inevitably affect the performance of the accelerometer.
Quartz crystal is the main component of quartz pendulum, it is a brittle non-metallic material, with high strength, high hardness, low conductivity and low fracture toughness characteristics. It is different from common metal materials, processing methods have a great impact on its strength, and any improper processing technology will affect the reliability, fracture strength and surface integrity of the quartz surface. At present, the commonly used processing method is laser cutting and chemical corrosion method, but this method has more procedures, and requires complex processes such as plugging, masking, and clamping. Experienced workers should also accurately grasp the corrosion time and acid temperature. Therefore, in order to improve the processing accuracy and efficiency, it is necessary to study the new processing technology.
2) Assembly technology
Assembly process quality directly determines the performance of the accelerometer. At present, the assembly process of the accelerometer is still using the traditional manual operation. The production acceleration timing adopts the assembly process of first trial assembly and then test. However, due to the large number of assembly links, it is difficult to accurately find the factors causing performance decline. Moreover, its performance is closely related to the operating habits, operating skills, experience knowledge, proficiency and other factors of assembly workers, resulting in the performance of the accelerometer after production being approximately normal distribution. The rate of special products is low. Therefore, in order to design a small-range and high-precision quartz flexible pendulum accelerometer and improve the overall performance of the accelerometer, it is necessary to consider the impact of processing and assembly technology on its performance, and scientifically improve the processing technology and assembly process of the accelerometer to reduce the manufacturing difficulty.
The quartz accelerometer ER-QA-03A produced by Ericco uses mature processing technology to ensure that it meets the demand for accuracy during use.
Railway transportation is one of the most important modes of transportation in China, and it has been developing continuously in recent years, with bullet trains, high-speed trains, intercity trains, and train speeds getting faster and faster. However, with greater speed comes greater danger, and accidents abound.
Although the state requires the limit of speed, but the limit of speed can not solve the fundamental problem, how to ensure driving safety, to create a stable and efficient driving environment is the most urgent need at present.
The train is a special means of transport running on the railway track. Its use environment is complex and changeable, and it is often affected by various factors such as wind, snow, earthquake, debris flow, landslide, tunnel foreign matter, geological mutation, etc. It is easy to cause deformation of the railway track and be covered by foreign matter, which seriously threatens the safety of the train.
Ericco’stilt sensor measurement accuracy of 0.01°, not only can accurately measure the inclination of the track, deformation, but also real-time monitoring of the inclination of the surrounding environment of the track, especially in some places rarely visited, in advance to make a preventive alarm, to avoid the occurrence of major accidents.
The full name of “unmanned aircraft” is unmanned aircraft, which is operated by radio remote control equipment and self-provided program control devices, or by the on-board computer fully or intermittently autonomous operation. In order to make the UAV fly perfectly, IMU(Inertial Measurement Unit), gyroscope stabilization and flight controller technology are essential.
Working principle
The flight control of UAV is composed of main control MCU and inertial measurement module IMU. IMU provides the original sensor data of the aircraft’s attitude in space, and the data of the aircraft is generally provided by the gyroscope sensor/acceleration sensor/electronic compass. Gyroscopic stabilization technology is one of the most important components, allowing the drone to fly super-smoothly even in strong winds and gusts. This smooth flight allows us to take fantastic aerial views of the beautiful planet. With excellent flight stability and waypoint navigation, the UAV can generate high-quality 3D photogrammetry and liDAR images. The latest drones use an integrated head, which also includes built-in gyroscopic stabilization technology, so that the on-board camera or sensor has little to no vibration. This allows us to capture perfect aerial film and photographs. In order to meet the requirements of UAV equipment, the ER-MG2-300/400 gyroscopes not only use advanced differential sensor design, can eliminate the effects of linear acceleration and operate in the presence of shock and vibration in the extremely harsh environment, but also have a measurement range of 400 degrees/second and 0.01°/ hour bias instability. Capable of measuring angular velocities up to ±400°/s and has a digital output protocol compliant with SPI from mode 3. Angular rate data is expressed as 24-bit words.
Technical influence
The application of IMU in UAVs is not limited to attitude control and flight stability. It can also be used with other sensors such as GPS (Global Positioning System) and magnetometers to provide more accurate navigation and positioning information. At the same time, IMU can also be used for UAV attitude estimation, motion detection, obstacle avoidance and other functions, improve the autonomy and safety of the UAV, provide key data for the control and navigation of the UAV, so that the UAV can efficiently perform various tasks. The application of IMU will vary depending on the design and use of different types of UAVs, but whether it is fixed wing, multi-rotor or vertical take-off and landing and conversion UAVs, IMU is the core to achieve its flight control and navigation.
If you want to learn about or purchase IMU, please contact us
For different four-wheel positioning equipment, the key role is to measure the accuracy of the tilt sensor. Modern cars generally adopt front and rear independent suspension, and the main parameters detected by the four-wheel alignment instrument are wheel camber, kingpin rear angle, kingpin internal angle and front bundle. For the measurement of the above tilt angles, except the front beam angle is generally realized by the rotary disk or the angle sensor, and the other angles are generally adopted by the tilt sensor. The tilt sensor is fixed on the four-wheel alignment mounting plate, and then installed on the wheel of the car through the clamp.
Due to the reason of automobile structure, the tilt measurement of automobile wheel positioning angle is divided into direct measurement and indirect measurement. From the definition of wheel inclination, it can be seen that the measurement of wheel camber can be measured directly by the tilt sensor, while the kingpin internal inclination and kingpin rear inclination are not, because the kingpin is installed on the inside of the wheel, generally can not be measured directly by thetilt sensor.The measurement range of wheel inclination should be about ±15°. In today’s models, the inclination adjustment deviation value is generally about 5′, such as: Shanghai Volkswagen PASSAT B5 front wheel camber value is -0°35′ to ±0°25′, so the sensor measurement resolution should be less than or equal to 5′.
What is car four-wheel positioning?
From the structure of the car, the car’s steering wheel (front wheel), steering knuckle and front axle installation between the three has a certain relative position, this installation with a certain relative position is called steering wheel positioning, also known as front wheel positioning. Front wheel positioning includes
Kingpin back tilt (angle), kingpin inward tilt (angle), front wheel outward tilt (angle) and front wheel front bundle four contents. For the two rear wheels, there is also a relative position between the installation and the rear axle, called the rear wheel positioning. Rear wheel positioning includes wheel roll out (angle) and one rear wheel front bundle. In this way, the front wheel positioning and the rear wheel positioning are called four-wheel positioning.
When the vehicle leaves the factory, the positioning angle is pre-set according to the design requirements. These positioning angles are used together to ensure the driving comfort and safety of the vehicle. However, because the vehicle is sold and driven for a period of time, these positioning angles will change due to traffic accidents, severe bumps caused by uneven road potholes (especially when driving at high speed suddenly encounter uneven roads), chassis parts wear, chassis parts replacement, tire replacement and other reasons. Once the positioning angle changes due to any reason, it may produce uncomfortable symptoms such as abnormal tire wear, vehicle deviation, reduced safety, increased fuel consumption, accelerated wear of parts, heavy direction, and vehicle drift. Some symptoms make the vehicle very dangerous at high speeds.
What is a four-wheel locator?
The purpose of four-wheel positioning maintenance service is to diagnose and treat the above causes of vehicle discomfort by measuring the positioning Angle. Generally, the new car should be four-wheel positioning after 3 months of driving, and every 10,000 kilometers after driving, replacing the tire or shock absorber, and after the collision should be timely four-wheel positioning. The correct positioning of the wheel can ensure that the steering is flexible, the seat is comfortable, the straight line driving is maintained, the life of the tire is extended, and the vibration caused by the road is reduced.
At present, most of the instruments used for wheel positioning detection are “four-wheel positioning instrument”. During the detection, the four-wheel positioning instrument first measures the current four-wheel positioning parameters of the car, and then the computer automatically compares it with the stored value of the corresponding model to calculate the deviation value of the four-wheel positioning of the car, and the maintenance personnel can restore the original state by correcting the prompts of the positioning instrument.
In Summary:
Ericco introduces the ER-TS-4256DI1, a tilt sensor for automotive four-wheel aligners, which has multiple interfaces and can be easily embedded into user systems. It can resist external electromagnetic interference, adapt to the harsh industrial environment for long-term work, is the ideal choice for industrial automation control and platform attitude measurement. The main features are as follows:
Biaxial dip measurement (X and Y)
Resolution less than 0.01°, accuracy 0.1°
Single PCB board, easy to embed into the user circuit system
Single power supply, digital signal (RS485) output
Due to the different gyroscopes they have, these two types of IMUs are very different. Their 10 differences will be introduced below.
1.Technology: MEMS IMUs use microelectromechanical systems with accelerometers and gyroscopes based on micromachining technology.The FOG IMU uses a fiber optic gyroscope, which utilizes the principle of light interference in optical fibers.
2.Working principles: MEMS IMUs use the deflection of microstructures due to acceleration or rotation to measure motion. The FOG IMU measures motion by detecting the phase shift of light due to rotation in a fiber optic coil.
3.Accuracy: Compared to MEMS IMUs, FOG IMUs have higher accuracy and precision. This makes them particularly useful in situations where users rely on the IMU for long periods of time: accurate systems can calculate a position close to the true position even after hours.
4.Size and shape: MEMS IMUs are smaller and more compact, making them suitable for integration into smaller devices such as consumer electronics. FOG IMUs are typically larger and heavier, and are often used in larger systems such as aerospace and defense applications.
5.Cost: MEMS IMUs are generally more cost-effective than FOG IMUs, making them widely used in consumer products. FOG IMUs are more expensive due to their greater precision, highly specialized internal components, and complex advanced manufacturing processes.
6.Energy consumption: MEMS IMUs typically have lower power consumption, making them suitable for portable and battery-operated devices. FOG IMUs consume more power, which is less important in applications such as land vehicles and aircraft where power supplies are readily available.
7.Application: MEMS IMU can be used for north seeking in logging tools/gyro tools, pointing, steering and initial alignment in guided weapons/drone launch systems in advanced mining/drilling equipment, direction in satellite antennas, target tracking systems , pointing and tracking navigation-level MEMS guidance and navigation in weapon systems, directional railway train systems, navigation-level MEMS IMU/INS for precise attitude and position, measurement of north seeking and positioning in geodesy/land mobile mapping systems, Oil exploration, bridges, high-rise buildings, towers, dam monitoring, geotechnical monitoring, mining, etc. FOG IMUs are commonly used in aerospace, defense, marine navigation and other high-precision applications, particularly where GNSS is unavailable or unreliable, such as underground mining or military environments.
8.Robustness: MEMS IMUs can be susceptible to environmental factors such as extreme temperatures and high vibrations, which can affect their accuracy. The FOG IMU is more robust and stable, making it better suited for particularly harsh and demanding environments.
9.Calibration and automatic north seeking: Due to possible drift over time, MEMS IMUs may require more frequent calibrations to maintain accuracy. They are not sensitive enough to automatically find an accurate heading unless connected to a GNSS receiver. FOG IMUs have better long-term stability and typically require less frequent calibrations to maintain accurate heading or position. The most accurate fiber optic gyroscope systems are so sensitive that they can determine where north is by detecting the Earth’s rotation.
10.Integration: Because MEMS IMUs are smaller and have lower power requirements, they are easier to integrate into compact devices. FOG IMUs are typically used in larger systems to accommodate their size and weight and their higher power needs.
Selection of MEMS IMU and FOG IMU In summary, the choice of IMU depends on the application and environment. You can choose the IMU type that suits you according to different application scenarios, accuracy requirements, etc.
MEMS IMUs are ideal for: lightweight, small size, low power consumption, short-range pointing sensors, and GNSS integration in predictable dynamic environments.
FOG IMU is suitable for: absolute attitude accuracy, high temperature, high vibration, bias stability over time.
The above content is just a brief introduction to MEMS IMU and FOG IMU from three aspects, which can be used as a reference for selecting IMU. If you want to know more about IMU products, please click the link below.












.jpg)

