1.What is a fiber optic gyroscope?
A fiber optic gyroscope (FOG) is a device used to measure angular velocity and direction. It provides extremely accurate rotational speed information with low maintenance costs and long service life.
Fiber optic gyroscopes are becoming more affordable, and the technology has proven beneficial for an ever-expanding array of different high-performance inertial navigation systems (INS). As a result, FOG has become the default choice for strategic and tactical level applications that require long-term navigation in environments where GNSS (Global Navigation Satellite System) is not available.
2.How does a fiber optic gyroscope work?
Fiber optic gyroscopes use the properties of light in closed circuits to estimate changes in direction. Two beams of light are sent in opposite directions in the fiber coil.
As the vehicle rotates, the beam traveling against the rotation experiences a slightly shorter path delay than the other beams, a phenomenon known as the Sagnac effect. The phase shift difference between the two beams is then used to estimate the rotation rate.
3.What is the difference between a ring laser gyroscope and a fiber optic gyroscope?
Similar to the FOG, the ring Laser gyroscope (RLG) is an optical gyroscope that utilizes the Sagnac effect. The main difference between the two is the way they are constructed, because a ring laser gyroscope uses a laser passing through a system of mirrors to determine the rotation of the vehicle, rather than a simple fiber optic coil.
In addition to requiring extremely high manufacturing precision and special mirrors, the RLG is also filled with gas, and the laser needs to be "dithered," or mechanically vibrated, to prevent laser locking to eliminate small rotations.
While both types of gyroscopes work similarly and are very accurate, the older toroidal laser gyroscope technology is more sophisticated due to its construction, requires more maintenance, and is generally more expensive. In contrast, the fiber optic gyroscope is a solid-state device that does not use a jitter mechanism, which means it does not produce any acoustic vibrations, making it more durable and reliable than the RLG. In addition, the application of fiber optic gyroscopes can be extended by changing the length and diameter of the fiber optic coils.
4.What is the difference between a fiber optic gyroscope and a MEMS gyroscope?
A MEMS (Micro-electro-mechanical System) gyroscope is a smaller, lighter gyroscope made from tiny devices. MEMS gyroscopes have significantly reduced SWaP-C, which means they are preferred for applications requiring small payloads.
FOG has higher inertial performance and lower deviation, making it the preferred solution for high-precision applications such as GNSS rejection environments or antenna pointing.
5.What can fiber optic gyroscopes be used for?
Fiber optic gyroscope technology facilitates a growing number of applications where accurate heading and navigation are critical. This includes both manned and driverless vehicles.
Surface Ocean Vehicles: Ocean survey vessels use fiber optic gyroscopes to determine pitch, roll, and heading in real time and build accurate position data for unmanned underwater vehicles (UUV). They are particularly useful for side-scan sonar and similar applications.
Undersea vessels: Manned vehicles (such as submarines) and UUVs (unmanned underwater vehicles), including autonomous underwater vehicles (AUVs) and remotely operated vehicles (ROVs), rely on fiber-optic gyroscopes for precise navigation in extremely challenging and dangerous environments at minimal cost. Or an unreliable source of absolute location. Rovs and AUVs for hydrology in particular benefit from FOG's precision.
Aviation: Helicopters can be subject to electromagnetic interference and can benefit greatly from FOG-based INS. Unmanned aerial vehicles (UAVs) and commercial aircraft typically require FOG-level performance to reduce the risk of losing GNSS locations while in flight. The accuracy of roll, pitch and yaw data is critical to the safe operation of the aircraft.
Defense: Ground-based defense vehicles must not rely on GPS/GNSS because of the risk of local interference or spoofing of these signals, or simply the risk of terrain blocking or altering satellite positioning data. Fibre-based INS allows these vehicles to operate seamlessly, preventing adversaries from gaining an advantage from these tactics.
Space exploration: Fiber optic gyroscopes are ideal for space applications due to their long service life, virtually maintenance-free, extremely low power consumption, and accurate navigation data.
Robotics: Directional data from the fiber optic gyroscope is used to navigate the robot, ensuring safe operation when adjusting for any changes in speed, position or acceleration.
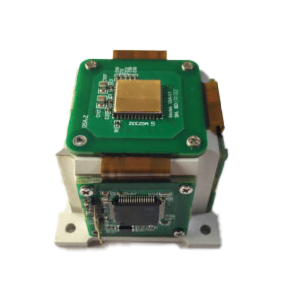
Ericco's ER-FOG-50, ER-FOG-60 small size, light weight, the use of digital closed loop mode, no wear parts, long service life, a wide range of applications, is our good choice, if you are interested in our products, please feel free to contact us.