1. Why do people monitor tilt angles?
The world is constantly changing, and the tendencies of different objects and machines can provide insight into worrying trends and potential future problems. There are many reasons why people need to monitor the Angle or degree of inclination.
Avoid accidents and injuries
One reason is that it can help prevent injuries and avoid accidents. When people work on the slope, they need to pay attention to the Angle of the slope to ensure that they do not slip. If the Angle is too steep, it can cause an avalanche, which is very dangerous.
Ensure the normal operation of the device
Another reason to monitor the tilt Angle, or tilt, is to make sure the equipment is working properly. For example, if a machine is not level, it may not work properly. This can be dangerous for the person using the device and the people around it.
2. Where can the tilt sensor be used?
Tilt sensors can be used in many applications, such as the Marine industry, construction industry, infrastructure monitoring, etc.
Marine industry
Tilt sensors can be used on ships to measure ship roll and pitch. This information can be used to improve the stability of the ship and avoid capsizing.
Construction industry
In many construction machines, such as excavators and bulldozers, tilt sensors can be used to measure the Angle of the machine blade or bucket. This information can be used to automatically adjust the position of the blade or bucket, or to provide feedback to the operator.
Infrastructure monitoring
Tilt sensors can be used to monitor the status of infrastructure such as Bridges and buildings and alert authorities to potential hazards, such as leaning towers. By continuously monitoring the tilt of the structure, the sensors can detect even the smallest changes that could indicate a problem. In the event of a potential accident, sensors can provide critical information that can be used to evacuate people and take other safety measures.
Tree bend monitoring
Some trees may fall after storms, typhoons or other natural disasters. Tilt sensors can be installed at a certain height on these trees to monitor their x, y, and z values in real time. This can provide insights into tree tilt and movement and help make timely, effective decisions to protect trees and people.
Gate monitoring
In car parking lots and parking garages, the normal operation of road gates is crucial to the normal toll collection. The tilt sensor can be installed in the guardrail housing, especially suitable for the guardrail Angle measurement and movement detection, to determine whether the guardrail is dropped, bent or broken, if there is a trigger alarm, so that maintenance personnel can take measures in time. Ensure regular charges.
3. Summary
Ericco's ER-TS-12200-Modbus precision up to 0.001°, the use of advanced Internet of Things technology Bluetooth and ZigBee(optional) wireless transmission technology, all internal circuits are optimized design, using industrial MCU, three-proof PCB board, imported cables, wide temperature metal shell and other measures, Improve the industrial level of products. Good long-term stability, zero drift small, can automatically enter low-power sleep mode, get rid of the dependence on the use of the environment, equipped with IP67-rated housing, so that it can withstand harsh conditions and still work normally. The optimized internal design of multi-layer structure, sealing ring, and three anti-coating further enhances the waterproof and dustproof capability.
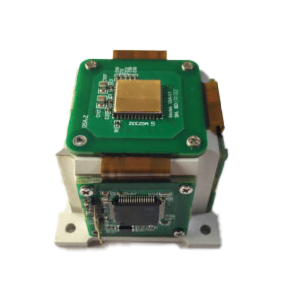
The ER-TS-3160VO voltage uniaxial tilt sensor is an analog voltage uniaxial tilt sensor. The user only needs to collect the sensor voltage value to calculate the tilt Angle of the current object. The built-in (MEMS) solid pendulum measures changes in the static gravity field, converts them into changes in inclination, and outputs them via voltage (0~10V, 0.5~4.5V, 0~5V optional). The product adopts the non-contact measurement principle and can output the current attitude and inclination Angle in real time. If you would like more technical data, please feel free to contact us.





.jpg)
